
Recently, the UAV Coaxial Multi-Sensor System Research Group of the School of Ocean and Space Information of our school has cooperated with the University of Strathclyde, Beijing University of Aeronautics and Astronautics, Xi’an Jiaotong University and other universities, and has obtained achievements in the research of intelligent unmanned detection systems. The latest progress, related research results Autonomous detection of damage to multiple steel surfaces from 360° panoramas using deep neural networks (based on deep neural networks for multiple steel surface damage 360-degree panoramic automatic detection) published in the International Engineering Technology Area Top Journal Computer -Aided Civil and Infrastructure Engineering (impact factor 11.775). The first author and corresponding author of the paper is the young teacher Marie Curie scholar Luo Si of our school, and China University of Petroleum (East China) is the first signing unit. This achievement was jointly supported by the National Natural Science Foundation of China Joint Fund Key Support Project, the National Natural Science Foundation of China General Project, the National Natural Science Foundation of China Youth Science Fund Project, the European Union Horizon Project (Horizon 2020) and the China University of Petroleum (East China) Independent Innovation Fund project. .
Due to prolonged exposure to harsh working environment, the surface of complex three-dimensional structure infrastructure is prone to erosion. How to detect the surface of the facility accurately, quickly and efficiently to improve maintenance efficiency is one of the difficult problems in the field of engineering technology.
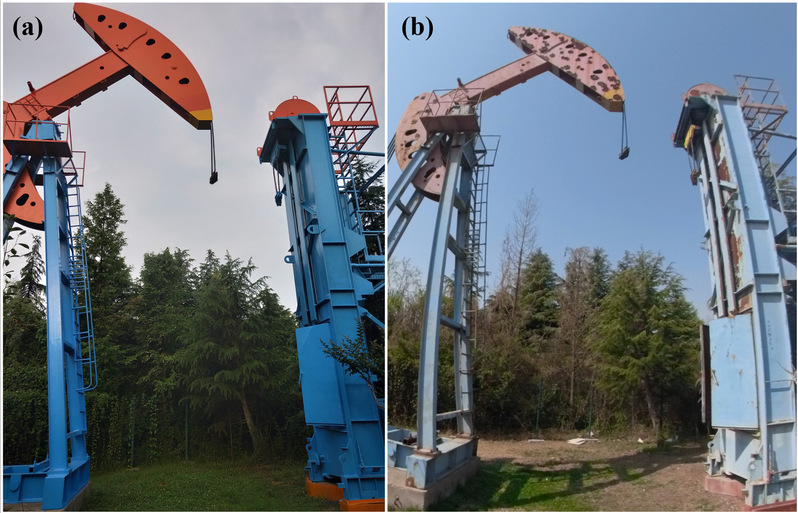
Figure 1 Erosion on the surface of complex three-dimensional structure infrastructure
At present, the commonly used technology in the world is to use the drone equipped with a camera to determine the location and type of the damage through the method of manual identification. The recognition accuracy of the prior art greatly relies on the recognition experience of human observers. At the same time, due to the limitation of the conventional camera's field of view, it is necessary to manually operate the drone to shuttle through the infrastructure multiple times, which increases the risk of crashes. The UAV research team used the UAV to carry a 360-degree panoramic camera, and designed an intelligent algorithm based on a deep neural network for the loss detection of the complex three-dimensional structure surface. The comprehensive classification and recognition accuracy increased from 77.53% to 87.34%. The intelligent unmanned detection system in complex environment provides theoretical guidance and design ideas.
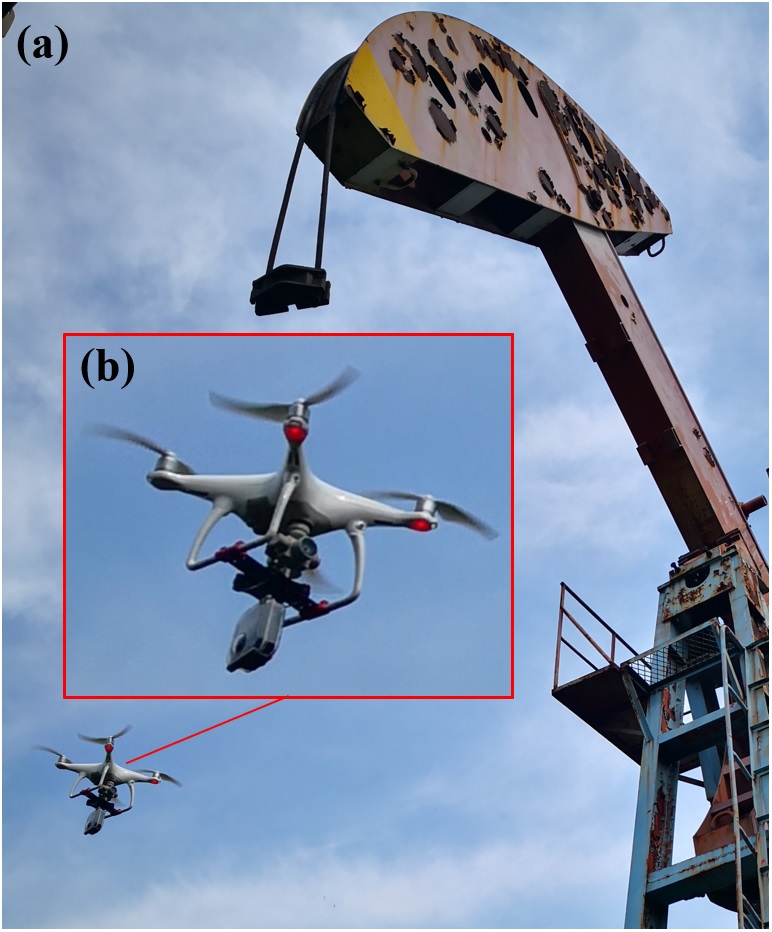
Figure 2 Intelligent unmanned panoramic detection system
After years of accumulation and development, the UAV coaxial multi-sensor system research team has formed a high-level research team with multidisciplinary collaborative innovation in electronics, communications, surveying and mapping, machinery, control, and materials. There are currently 3 professors and 5 associate professors. There are 3 lecturers, 6 full-time doctoral students and more than 90 master students. In recent years, he has undertaken 8 national-level projects such as the National Natural Science Foundation, National Key Research and Development Programs, and major international cooperation projects. More than 40 papers have been published in well-known domestic and foreign journals such as IEEE PAMI, CACIE, IEEE TIE, RSE, and IEEE TGRS. The external unmanned ecological observation system and the field of mobile networking have formed a certain influence.
Related Links: